GTBZ14JD Plataforma d'operació aèria de braç de manivela elèctrica





I. Descripcions generals i característiques del producte
Les plataformes aèries de manivela elèctrica estan desenvolupades per XCMG, estructures compactes i carrosseria del vehicle d'1,75 m d'ample.El sistema de control intel·ligent i perfecte presenta un disseny humanitzat, un disseny sense manteniment i un ús i manteniment fàcils, que ofereix múltiples opcions i una seguretat integral.
[Avantatges i característiques]
● La combinació de la pluma en forma de Σ i el disseny de deriva zero la fan més productiva.
● Un radi de gir tan petit com 3,15 m permet que la màquina funcioni en espais estrets.
●La bateria de gran capacitat de 48V i 420Ah fa que la capacitat de creuer sigui més llarga.
●Tecnologies avançades de funcionament del motor de CA;tecnologies de control diferencial de direcció;accions potents i constants;capacitat de desnivell fins a un 30%
●La bomba de corrent continu i les tecnologies de control proporcional són eficaços i estalvien energia, fent que el treball sigui més estable i segur.
●Respectuós amb el medi ambient, zero emissions, baix soroll, viatges sense traça, adequat per a la construcció d'interiors.
II.Introducció de les parts principals
1. Part del xassís
Configuracions principals;2WD, direcció de dues rodes, pneumàtics sòlids.
(1) Velocitat màxima de conducció a 5,2 km/h.
(2) Aptitud màxima al 30%.
(3) S'aplica el reductor de desplaçament integrat que integra el motor i el reductor i es proporcionen dues velocitats de conducció (alta velocitat i baixa velocitat) per satisfer les demandes de conducció de la màquina en diferents entorns.El mecanisme de desplaçament disposa d'una funció d'autofrenatge mentre es viatja per pendents i està equipat amb un dispositiu d'embragatge per facilitar el remolc en cas de mal funcionament.
(4) Mecanisme de maneta lliscant per girar per aconseguir un radi de gir més petit;
2. Part del boom
(1) Braç plegable + braç telescòpic + manivela
(2) Material de la pluma: la pluma està soldada amb acer d'alta resistència per aconseguir un pes lleuger i una alta seguretat.
(3) El braç plegable és de dos conjunts d'estructures de paral·lelogram, amb enllaços entremig, i es pot moure al mateix temps amb l'ajuda d'un cilindre abatible, fent que el treball sigui més eficaç.
(4) Dues seccions de braços telescòpics són de tipus telescòpic d'un sol cilindre;els braços de la manovella són de paral·lelogram
3. Part de la placa giratòria
(1) gir discontinu de 355 ° i dos forats de muntatge per transferir els passadors de bloqueig;
(2) El plat giratori es compon d'una sola placa amb costella de reforç;els punts de frontissa estan molt col·locats i el contrapès es col·loca a la part posterior de la plataforma giratòria;
4. Part de plataforma
(1) Plataforma de treball gran d'1,4 m × 0,7 m.
(2) Plataforma giratòria de 160°.
(3) Fins a 227 kg de capacitat de càrrega.
(4) Sistema d'anivellament automàtic proporcional electrohidràulic.
5. Sistema hidràulic
(1) Peces hidràuliques: les peces principals, incloses la bomba hidràulica i la vàlvula mestra, adopten productes de marca de renom internacional.
(2) El sistema hidràulic s'acciona amb una bomba de bateria;La bomba d'engranatges s'acciona directament amb el motor.
(3) El sistema hidràulic de la superestructura és d'un sistema de bomba d'engranatges de flux constant: basat en les tecnologies de control proporcional elèctric-hidràulic, la màquina pot realitzar el gir de la superestructura, l'arrossegament de la pluma, la retracció/extensió de la pluma, el balanceig del treball. plataforma;la vàlvula principal de superestructura és de vàlvula proporcional elèctric-hidràulica.
(4) Unitat de potència d'emergència instal·lada: pot garantir que la pluma es pugui retreure a l'estat de conducció en cas de mal funcionament del motor o de la bomba d'oli.
6. Sistema elèctric
(1) Tecnologia de control PLC: es proporciona un controlador per a la plataforma giratòria i la plataforma.S'instal·la una caixa de control per a la plataforma giratòria i la plataforma del xassís, respectivament, per controlar el xassís, la plataforma giratòria, la pluma i la plataforma.
(2) Elements de control principals: direcció del xassís i control de viatge;el gir de la plataforma giratòria;pluma telescòpica;control de luffing;el gir de la plataforma
(3) Múltiples mètodes de protecció de seguretat: control de l'accionament del motor;protecció de la sobrecàrrega del motor;avís d'inclinació del vehicle;avís de sobrecàrrega;córrer a alta velocitat limitada;baixada d'emergència;
III.Configuració de les peces principals del GTBZ14JD
| S/N | Nom | Quantitat | Nota |
| Bateria | 8 | troià | |
| Carregador | 1 | Dongguan Longsheng | |
| Accionament del motor | 2 | CURTIS | |
| Reductor de viatge | 2 | Omni | |
| Motor de corrent altern en funcionament | 2 | KDS | |
| Bomba de bateria principal | 1 | BUCHER | |
| Bomba de bateria auxiliar | 1 | BUCHER | |
| Bomba principal | 1 | Sant | |
| Cilindre oscil·lant | 1 | EUA HELAC | |
| Cilindre d'anivellament | 2 | Chengdu Chenggang Hydraulic Equipment Co., Ltd./XCMG Hydraulic Parts Co., Ltd. | |
| Cilindre abatible del braç número 1 | 2 | ||
| Cilindre abatible del braç núm. 2 | 1 | ||
| Cilindre de braç de manovella | 1 | ||
| Cilindre telescòpic | 1 | ||
| Cilindre de direcció | 1 | ||
| Vàlvula d'equilibri | 5 | Sant/EATON | |
| Controlador | 2 | Hirschmann | |
| Sensor d'inclinació de doble eix | 1 | Parker | |
| Mostra | 1 | Xuzhou Hirschmann Electronic Co., Ltd. | |
| Joystick | 2 | Danfoss | |
| Interruptor de peu | 1 | SOLS | |
| Girar i conduir | 1 | Huafang | |
| Motor basculant | 1 | Blanc | |
| Pneumàtics | 4 | Laizhou Yishimai |
IV.Taula de paràmetres tècnics principals del GTBZ14JD
| Article | Paràmetre |
| Paràmetres de l'estat de funcionament | |
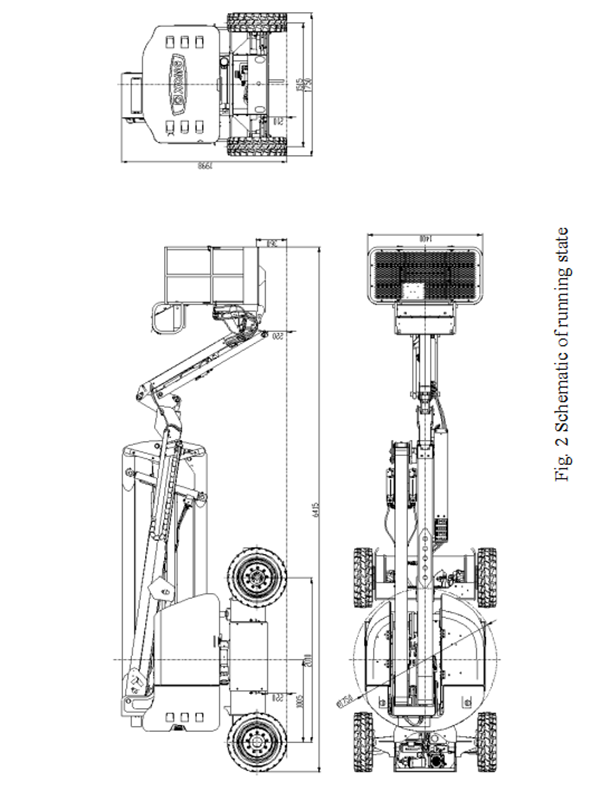
| Dimensions totals (L × W × H) | 6,42×1,75×2 m |
| Dimensions totals de la plataforma de treball | 1,4×0,7×1,15 m |
| Velocitat màxima | 5,2 km/h |
| Màxima capacitat de desnivell | ≥30% |
| Min.radi de gir exterior | ≤3,15 m |
| Altura al sòl/m (centre) | 0,21 m |
| distància entre eixos | 2 m |
| Massa total | 6500 kg |
| Paràmetres principals de rendiment de l'operació | |
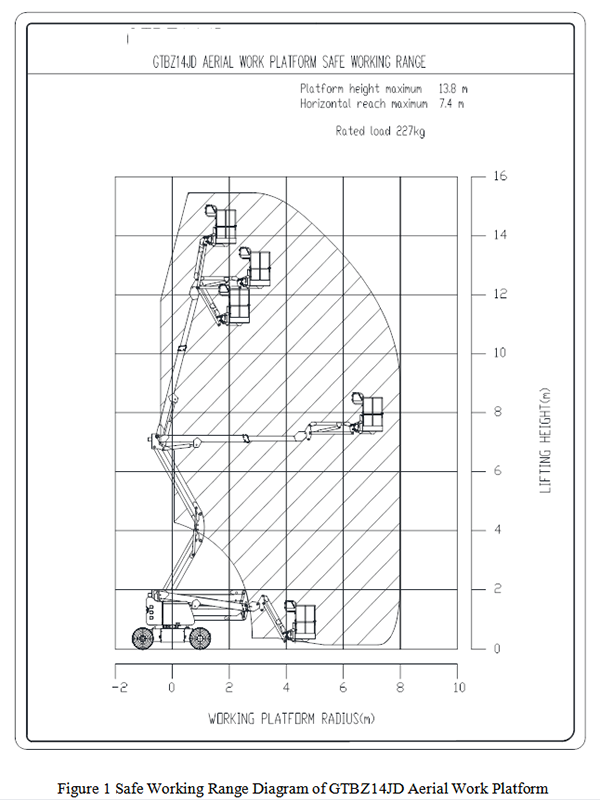
| Altura nominal de treball | 15,5 m |
| Alçada màxima de la plataforma | 13,8 m |
| Màx.rang de treball | 8 m |
| Alçada màxima d'abast de la xarxa | 7,03 m |
| Amb l'abast de l'enrotllament del braç número 1 | 0°~60° |
| Amb l'abast del braç núm. 2 | -8°~75° |
| Àmbit de l'enrotllament del braç de la manivela | -60°~80° |
| Àmbit del swing de plataforma | 180° |
| Angle de gir | 355° |
| Radi de gir de la plataforma giratòria | 0,875 m |
| Càrrega màxima | 227 kg |
| Màxima gir cap enrere | 0 m |
| Sistema de control | Control proporcional de 12 V CC |
| Pneumàtic | Pneumàtic sòlid 250-15, opcional 240/55 D17.5 |
| Paràmetres de potència | |
| Font d'alimentació | 420 Ah/48 V DC |
| Unitat de potència | 4 kw/48 V DC |
| Unitat de potència auxiliar | 2,2 kw/24 V DC |
| Motor en marxa | 3,3 kw/32 V AC |
V. Diagrama del rang de treball segur de la màquina
Adjunt: configuracions opcionals
6.1 Pneumàtic sòlid respectuós amb el medi ambient (sense traça)
6.2 Alimentació elèctrica de la plataforma
El generador hidràulic o la font d'alimentació externa es connecten a aquesta plataforma per al seu ús.
Especificació del cable d'alimentació: 4 × 4 mm2
Corrent nominal: 35A
6.3 Tub d'aire de la plataforma
El subministrament d'aire extern es condueix a aquesta plataforma per utilitzar-lo.
Diàmetre del tub d'aire: 8 mm
6.4 Suport antiimpacte de la plataforma
El dispositiu antiimpacte plegable hauria de protegir l'operador de ser impactat amb l'element anterior durant l'aixecament de la plataforma, i també podria ser plegable, sense ocupar l'espai de treball.