Plataforma d'operació aèria de braç recte GTBZ22S





I. Descripcions generals i característiques del producte
GTBZ22S El braç recte i la plataforma d'operació aèria autopropulsada destaquen amb un rendiment, eficiència, dinàmica i fàcil operació excepcionals.És líder en la indústria amb una capacitat de càrrega màxima de 340 kg, una gran alçada i amplitud d'operació, adequat per a la construcció de grans càrregues i una àmplia àrea d'operació.
[Avantatges i característiques]
● L'enllaç paral·lel doble i el braç telescòpic podrien realitzar l'ajust dinàmic del centre de gravetat del vehicle, fent que el vehicle complet sigui més estable.
●Amb 4WD, pneumàtics amples tot terreny i sistema d'equilibri d'eixos, la màquina és excel·lent en conducció i adaptabilitat a la carretera.
●Les tecnologies de control d'embolcalls de càrrega múltiple podrien supervisar la càrrega en temps real, fent ús eficaç de la pluma i fent que el seu rendiment laboral sigui avançat.
● El mecanisme d'extensió de l'equilibri automàtic millora la seguretat del mecanisme d'extensió i allarga la vida útil de la corda d'acer.
●El sistema de control elèctric adopta les tecnologies de control distribuït basades en PLC i CAN, implementant l'anivellament automàtic, la ponderació de la càrrega útil de la plataforma, el monitoratge dinàmic i l'avís d'error.
II.Introducció de les parts principals
1. Part del xassís
Configuracions principals: 2WD, direcció a les quatre rodes, equilibri d'eixos i pneumàtics d'escuma de perfusió.
(1) Velocitat màxima de conducció a 6 km/h.
(2) Aptitud màxima al 45%-Max.nivell a la indústria
(3) Sistema d'equilibri d'eixos: millora considerablement la capacitat del vehicle per creuar qualsevol carretera accidentada.
(4) S'aplica el reductor de desplaçament integrat que integra el motor i el reductor i es proporcionen dues velocitats de conducció (alta velocitat i baixa velocitat) per satisfer les demandes de conducció de la màquina en diferents entorns.El mecanisme de desplaçament disposa d'una funció d'autofrenatge mentre es viatja per pendents i està equipat amb un dispositiu d'embragatge per facilitar el remolc en cas de mal funcionament.
2. Part del boom
(1) Pluma telescòpica de 3 seccions d'un cilindre telescòpic únic + cable de filferro.
(2) Material de la pluma: la pluma està soldada amb acer d'alta resistència per aconseguir un pes lleuger i una alta seguretat.
(3) Vertical + boom que s'aixeca i s'eleva simultàniament, fent-lo més productiu.
(3) Coincidència força-rigidesa: garanteix la força i la rigidesa excepcionals de la pluma.
3. Part de la placa giratòria
(1) La plataforma giratòria és capaç de girar contínuament 360 ° i està equipada amb dos forats per a la instal·lació de passadors de bloqueig de transport.
(2) Sistema d'alimentació: els motors Perkins/Deutz estan equipats amb un sistema optimitzat d'absorció de cops i dissipació de calor.
(3) El muntatge del motor giratori està cargolat al bastidor del vehicle i es pot extreure, facilitant l'accés al motor i als seus accessoris per al manteniment i la reparació.
4. Part de plataforma
(1) Plataforma de treball gran de 2,4 m × 0,9 m.
(2) Plataforma giratòria de 160°.
(3) Capacitat de càrrega de fins a 340 kg.
(4) El sistema d'anivellament automàtic proporcional electrohidràulic podria controlar en temps real l'angle de la plataforma, anivellant-lo dinàmicament.
5. Sistema hidràulic
(1) Bomba tancada + bomba variable: la primera s'utilitza per controlar el sistema de funcionament i la segona per controlar el sistema hidràulic complet accionat directament amb el motor, excepte el sistema de funcionament;
(2) Unitat d'energia d'emergència instal·lada: pot garantir que la pluma es pugui retreure a l'estat de conducció en cas de mal funcionament del motor o de la bomba d'oli.
(3) El sistema hidràulic de la superestructura és d'un sistema de pressió constant de bomba variable: basant-se en les tecnologies de control proporcional elèctric-hidràulic, la màquina pot realitzar la rotació de la superestructura, l'aixecament de la pluma, la retracció/extensió de la pluma, el balanceig del treball. plataforma;la vàlvula principal de superestructura és de vàlvula endollable;la màquina està muntada amb radiador d'oli hidràulic.
(4) El sistema de funcionament és d'un sistema variable tancat: tipus d'accionament 4×4, classificat en engranatges d'alta velocitat i de baixa velocitat.El sistema hidràulic del tren d'aterratge podria realitzar l'equilibri de l'eix i les funcions de direcció.
5. Sistema elèctric
(1) Tecnologia de control PLC: es proporciona un controlador per a la plataforma giratòria i la plataforma.S'instal·la una caixa de control per a la plataforma giratòria i la plataforma del xassís, respectivament, per controlar el xassís, la plataforma giratòria, la pluma i la plataforma.
(2) Elements de control principals: preescalfament del motor, arrencada, apagada i control de velocitat;Pressió de l'oli del motor, comprovació i avís de la temperatura del refrigerant;Control de conducció i direcció del xassís;Control de la rotació de la plataforma giratòria i de la pluma i el control telescòpic;Control de gir de la plataforma;Comprovació de càrrega de la plataforma;Anivellació de la plataforma.
(3) Múltiples mètodes de protecció de seguretat: control del motor i posada en marxa del protector;vehicle - avís d'inclinació;avís de sobrecàrrega;control de la soltació del fil d'acer.
III.Configuració de les peces principals del GTBZ22S
| S/N | Nom | Quantitat | Nota |
| Motor | 1 | Perkins/Yuchai | |
| Reductor de viatge | 4 | OMNI/RR | |
| Motor de viatge | 4 | DAFOSS/Shengbang | |
| Bomba tancada | 1 | REXROTH/Liyuan | |
| Unitat de potència | 1 | BUCHER | |
| Grup de vàlvules de plataforma | 1 | Sant/Shengbang | |
| Grup de vàlvules de plat giratori | 1 | ||
| Grup de vàlvules de control de desplaçament | 1 | ||
| Cilindre oscil·lant | 1 | HELAC/Weihai Liansheng | |
| Cilindre de braç de manovella | 1 | Chengdu Chenggang Hydraulic Equipment Co., Ltd./XCMG Hydraulic Parts Co., Ltd. | |
| Cilindre d'anivellament | 1 | ||
| Cilindre de derricking | 1 | ||
| Cilindre telescòpic | 1 | ||
| Cilindre de direcció | 2 | ||
| Cilindre d'equilibri | 2 | ||
| Radiador d'oli hidràulic | 1 | Yinlun | |
| Controlador | 2 | XCMG | |
| Sensor d'inclinació de la placa giratòria | 1 | Xangai Parker Hannifin | |
| Sensor d'inclinació de la plataforma | 1 | Xuzhou Youwell | |
| Sensor de pesatge | 1 | ||
| Joystick | 2 | DAFOSS | |
| Interruptor de peu | 1 | SOLS | |
| Coixinet de rotació | 1 | Ma'anshan Fangyuan | |
| Reductor de rotació | 1 | Xuzhou Keyuan | |
| Motor basculant | 1 | Ningbo Zhongyi | |
| Pneumàtic | 4 | Laizhou Yishimai |
IV.Especificació tècnica principal de GTBZ22S
| Article | Unitat | Paràmetre |
| a.Longitud total de la màquina completa | mm | 10150 |
| b.Amplada total de la màquina completa | mm | 2490 |
| c.Alçada total | mm | 2800 |
| d.distància entre eixos | mm | 2500 |
| Altura màxima de treball | m | 24 |
| Alçada màxima de la plataforma | m | 22 |
| Màxim rang de treball | m | 18.3 |
| Pes màxim de càrrega | kg | 230 (sense límit)/340 (amb límit) |
| Gamma de pujada de la pluma | ° | -5 ~ +75 |
| Angle de gir de la plataforma giratòria | ° | 360 |
| Màxima gir cap enrere | mm | 1550 |
| Dimensió de la plataforma | mm | 2400×900 |
| Angle de gir de la plataforma | ° | 160 |
| Pes total | kg | 12500 |
| Velocitat màxima de desplaçament | km/h | 6 |
| Radi de gir mínim | m | 6 |
| Altura mínima al terra | mm | 230 |
| Màxima capacitat de desnivell | % | 45 |
| Especificació del pneumàtic | - | 355/55D625 |
| Model de motor | - | Perkins 404D-22TYuchai 4D24T00 |
| Potència nominal del motor | kW/(r/min) | 43/(2600)48/(2700) |
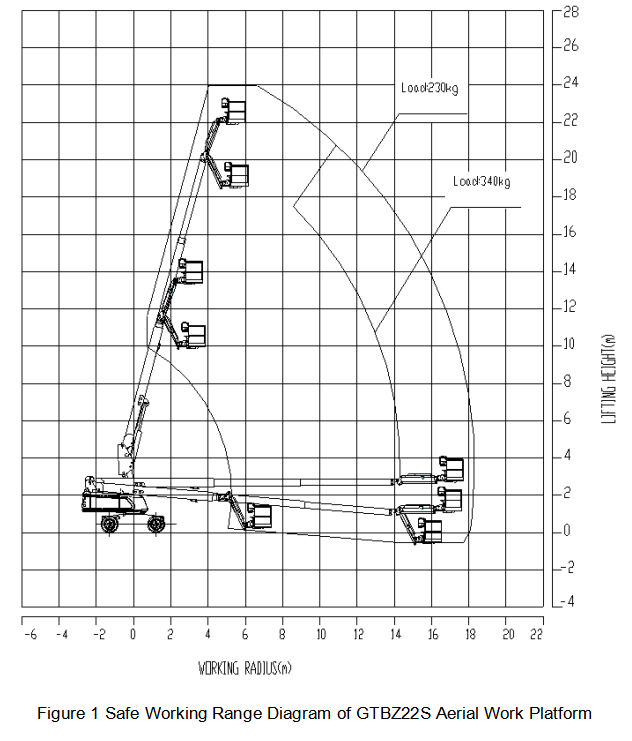
V. Diagrama del rang de treball segur de la màquina
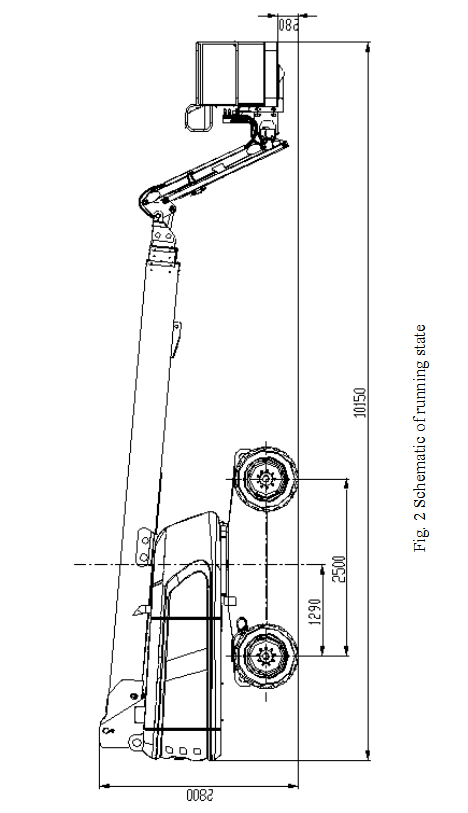
VI.Diagrama de dimensions de la màquina en estat de conducció